ブログ
BLOG
こんにちは。究進塾 編集部です。
今回は、電磁気学の第6回目「Poisson方程式、Laplace方程式」を学習します。
それに付随する数学的な補足として、3次元の極座標(球面座標と言います)を数学的な補足として学習します。
ポワソン方程式とラプラス方程式
ガウスの法則の微分型
まずは、以前にやった「ガウスの法則」の微分型を確認しましょう。
\(∇E = \frac{ρ}{ε_0}\)
このように、電場に∇を演算したものが\(\frac{ρ}{ε_0}\)、要は電荷密度です。単位体積あたりの電荷を表し、このような形になるということを学習しました。
また一方で、電場と電位\(V\)の関係は、次のように表します。
\(E = -∇V\)
電場\(E\)はマイナスがついて、\(∇V\)つまり電位\(V\)の傾きが電場になる、ということを学習しました。そして、この\(E\)の式を最初の式に代入すると、次のような式が得られます。
\(-∇^2V= \frac{ρ}{ε_0}\)
さらに、マイナスの符号を右辺に移項すると、
\(\color{red}{∇^2V = -\frac{ρ}{ε_0}}\)
という方程式ができます。このことを「ポワソン方程式」と呼んでいます。
このポワソン方程式において、もし電荷が0であるならばポワソン方程式の右辺が0になるので、次のような方程式になります。
\(ρ = 0\)ならば、
\(\color{red}{∇^2V = 0}\)
この方程式のことを、ラプラス方程式と呼んでいます。
| ポワソン(Poisson)方程式
\(∇^2V = -\frac{ρ}{ε_0}\) ラプラス(Laplace)方程式 \(∇^2V = 0\) |
これを\(x、y、z\)の直交座標系で書くと「\(x、y、z\)それぞれに\(V\)を2回微分したもの」を足したもの、ということになります。
直交座標系では
ポワソン方程式
\(\frac{∂^2V}{∂x^2}+\frac{∂^2V}{∂y^2}+\frac{∂^2V}{∂z^2} = -\frac{ρ}{ε_0}\)
ラプラス方程式
\(\frac{∂^2V}{∂x^2}+\frac{∂^2V}{∂y^2}+\frac{∂^2V}{∂x^2} = 0\)
極座標(3次元)
次に、極座標でこれを表すことを考えます。以前、2次元の極座標を学習しましたが、ここでは3次元の極座標というのを考えます。
位置座標
まず位置座標です。
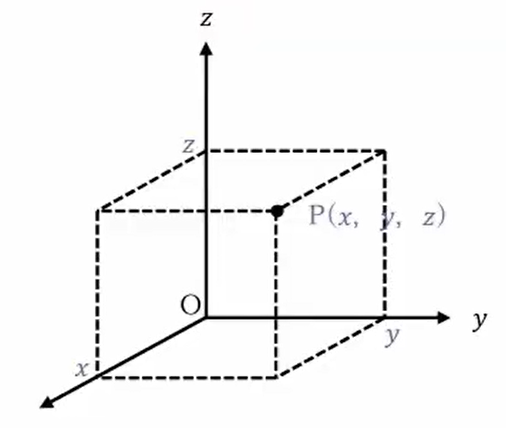
図のように、点\(P\)という点を\(x、y、z\)の座標で表すと、点\(P\)はそのまま\(x、y、z\)という3つの変数によって表されます。
これを極座標で表すと、3つの量を導入して表します。
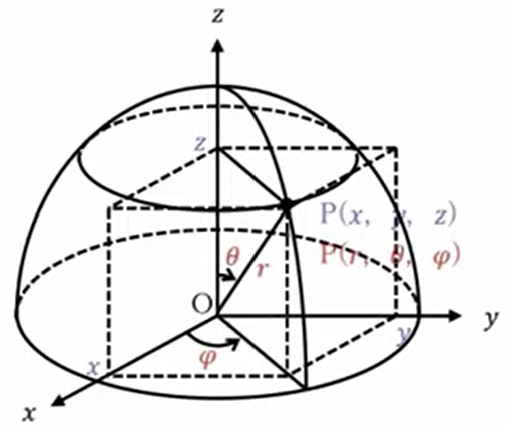
①原点\(r\)からの距離
②\(x\)軸から\(y\)方向に向かって回った回転角\(φ\)
③\(z\)軸から下の方向に回った角度\(θ\)
この3つを規定してあげると、点\(P\)の位置が決まって表すことができます。その時の変数は\(rθφ\)ということです。
\(θ\)についてはちょっと違うのですが、イメージとしては地球の位置を緯度・経度で表しているイメージに近いと思います。緯度の場合は\(y\)方向から測りますが、この場合は北極方向から測った角度を\(θ\)としてます。
これを、3次元極座標と言います。別の言い方で、球面座標あるいは球座標と言うこともあります。
そして\(x、y、z\)と直交座標系と極座標系の変数の関係を求めると、これは単純に斜円を求めることによって、それぞれ次のようになります。
\(x = r \ sin \ θ \ cos \ φ\)
\(y = r \ sin \ θ \ sin \ φ \)
\(z = r \ cos \ θ\)
逆に、\(rθφ\)を\(x、y、z\)で表すと、\(r\)は\(x、y、z\)の点の長さなので、それぞれ次のようになります。
\(r = \sqrt{x^2+y^2+z^2}\)
\(φ = tan^{-1}\frac{y}{x}\)
\(θ = tan^{-1}\frac{\sqrt{x^2+y^2}}{z}\)
このように表すことができます。これが位置座標の関係です。
基底座標
基底座標は、大きさが1 =単位ベクトルで表した3つのベクトルです。
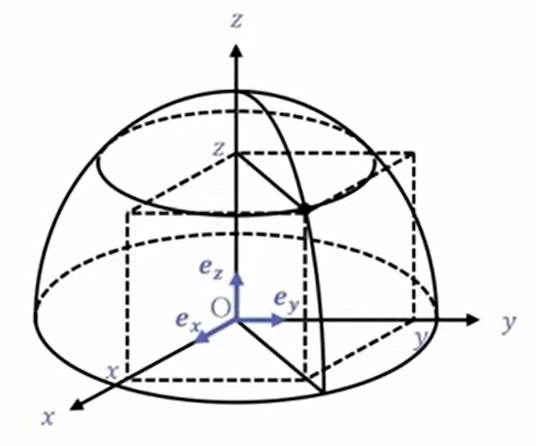
直交座標に関しては、この図では青字で書いた部分ですが、それぞれ\(x\)軸、\(y\)軸、\(z\)軸に沿った長さ1のベクトル\(e_x、e_y、e_z\)です。このベクトルを基底ベクトルとします。
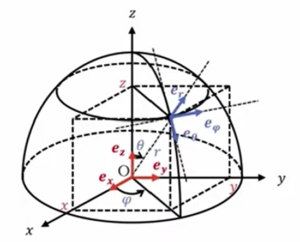
極座標の場合は、\(r\)のみが増える方向に取ったベクトルで長さ1を\(e_r\)、\(θ\)のみが増える方向に取ったベクトルを\(e_θ\)、\(φ\)のみが増える方法に取ったベクトルを\(eφ\)とすると、極座標系の基本ベクトルは次の図のように、この3つの赤い矢印で示したベクトルになります。

このベクトルはすべて基底ベクトルなので、大きさは1、互いに直交しています。そして、\(e_x、e_y、e_z\)を\(e_r、e_φ、e_θ\)という変数で表すと、次のようになります。
\(e_x = sin \ θ \ cos \ φ \ e_r \ + \ cos \ θ \ cos \ φ \ e_θ \ – \ sin \ φ \ e_φ\)
\(e_y = sin \ θ \ cos \ φ \ e_r \ + \ cos \ θ \ sin \ φ \ e_θ \ – \ sin \ θ \ e_φ\)
\(e_z = cos \ θ \ e_r \ – \ sin \ θ \ e_θ\)
これは\(e_x\)がどうなるかってことを表しますので、\(e_r\)というベクトルを、斜円を取っていって\(e_x\)方向に移してやる、ということをやります。\(e_θ\)、\(e_φ\)も同じようにやります。ということを図形的に考えると、この式は単純に出すことができます。
同様に、\(e_r、e_θ、e_φ\)を、\(e_x、e_y、e_z\)で表すこともできまして、\(e_x、e_y、e_z\)を\(r\)方向、\(e_θ\)方向、\(e_φ\)方向を斜円を取ってやり、図形的に考えて出すと、次の表な式が導入できます。
\(e_r = sin \ θ \ cos \ φ \ e_x \ + \ sin \ θ \ sin \ φ \ e_y \ + \ cos \ θ \ e_z\)
\(e_θ= cos \ θ \ cos \ φ \ e_x \ + \ cos \ θ \ sin \ φ \ e_y \ – \ sin \ θ \ e_z\)
\(e_φ= \ – \ sin \ φ \ e_x \ + \ cos \ φ \ e_y\)
これを行列形式で書くと、次のようにそれぞれ書くことができるわけです。
\(
\left(
\begin{array}{crl}
e_x\\
e_y\\
e_z
\end{array}
\right) \ = \
\left(
\begin{array}{crl}
sin \ θ \ cos \ φ \ & \ cos \ θ \ cos \ φ & – \ sin \ φ\\
sin \ θ \ cos \ φ \ & \ cos \ θ \ sin \ φ \ & \ – \ sin \ θ \\
cos \ θ \ & \ – \ sin \ θ \ & \ 0
\end{array}
\right)
\left(
\begin{array}{crl}
e_r\\
e_θ\\
e_φ
\end{array}
\right)\)
\(
\left(
\begin{array}{crl}
e_r\\
e_θ\\
e_φ
\end{array}
\right) \ = \
\left(
\begin{array}{crl}
sin \ θ \ cos \ φ \ & \ sin \ θ \ sin \ φ & \ cos \ θ\\
cos \ θ \ cos \ φ \ & \ cos \ θ \ sin \ φ \ & \ – \ sin \ θ \\
– \ sin \ φ \ & \ cos \ φ \ & \ 0
\end{array}
\right)
\left(
\begin{array}{crl}
e_x\\
e_y\\
e_z
\end{array}
\right)\)
この2つの式は当然、右辺の右側の行列と左辺の行列とが入れ替わった式になっているので、2つの式の右辺左側の行列は、互いに逆行列の関係にあります。
微分演算子の極座標表示(3次元)
さて、微分演算子\(∇\)を3次元極座標で表したらどうなるかを考えます。
まず\(∇\)は直交座標系では\(\frac{∂}{∂x}\)で表されてますので、これを\(rθφ\)の変数に変換しなきゃいけないわけです。
で、まず偏微分の基本方式として\(\frac{∂}{∂x}\)を変数変換するために、次のような偏微分の公式を使います。\(y\)、\(z\)についても同様です。
使うもの
\(\frac{∂}{∂x}= \frac{∂}{∂r}\frac{∂r}{∂x}+\frac{∂}{∂θ}\frac{∂θ}{∂x}+\frac{∂}{∂φ}\frac{∂φ}{∂x}\)
\(\frac{∂}{∂y}=\frac{∂}{∂r}\frac{∂r}{∂y}+\frac{∂}{∂θ}\frac{∂θ}{∂y}+\frac{∂}{∂φ}\frac{∂φ}{∂y}\)
\(\frac{∂}{∂z}=\frac{∂}{∂r}\frac{∂r}{∂z}+\frac{∂}{∂θ}\frac{∂θ}{∂x}+\frac{∂}{∂φ}\frac{∂φ}{∂z}\)
これを使って\(∇\)を\(rθφ\)の変数形に変換していくことになります。
その次に使うものが、先程も書きましたが、位置座標の関係です。

\(x、y、z\)は次のようになります。
\(x \ = \ r \ sin \ θ \ cos \ φ\)
\(y \ = \ r \ sin \ θ \ sin \ φ\)
\(z \ = \ r \ cos \ θ \)
また、\(r、φ、θ\)は次のようになります。
\(r \ = \ \sqrt{x^2+y^2+z^2}\)
\(φ \ = \ tan^{-1}\frac{y}{x}\)
\(θ \ = \ tan^{-1}\frac{\sqrt{x^2+y^2}}{z}\)
この変数変換の関係は使っていきます。
それで、それぞれで上に書いたように、\(\frac{∂r}{∂x}\)、\(\frac{∂θ}{∂x}、\frac{∂φ}{∂x}\)というようなものが必要になってくるので先に計算しておきます。
\(r \ = \ \sqrt{x^2+y^2+z^2}\)を\(x、y、z\)で偏微分してやればいいわけですから、次のようになります。
\(\frac{∂r}{∂x} \ = \ r \ sin \ θ \ cos \ φ \ \ \ \ \frac{∂r}{∂y} = \ sin \ θ \ sin \ φ \ \ \ \frac{∂r}{∂z} \ = \ cos \ θ\)
同様に\(φ\)も\(x、y、z\)でそれぞれ偏微分してやると次のようになります。
\(\frac{∂φ}{∂x} \ = \frac{ sin \ φ}{r \ sin \ θ} \ \ \ \ \frac{∂φ}{∂y} = \frac{cos \ φ}{r \ sin \ θ} \ \ \ \frac{∂φ}{∂z} \ = 0\)
で、ここで使ってるのはアークタンジェントです。数学の復習にもなるのですが、\((tan^{-1}x)’ \ = \ \frac{1}{1+x^2}\)、この式は微分する上で使っています。
\(θ\)も同様に計算していくと、次のように計算できます。
\(\frac{∂θ}{∂x} \ = \frac{ cos \ θ \ cos \ φ}{r} \ \ \ \ \frac{∂θ}{∂y} = \frac{cos \ θ \ sin \ φ}{r} \ \ \ \frac{∂θ}{∂z} \ = \ – \frac{sin \ θ}{r}\)
それからその次に、基底ベクトルの関係です。2次元の時もやりましたが、\(e_x、e_y、e_z\)は、この\(P\)の座標が変わっても変わらないベクトル=定ベクトルであることにより、定数と同じような性質を持っているベクトルです。
しかし、この\(e_r\)と\(e_θ\)と\(e_φ\)は、\(P\)の位置によって変わります。つまり、\(e_r、e_θ、e_φ\)は定ベクトルではなく、それぞれ\(r、θ、φ\)の関数になっている、ということが重要になっています。
そのことに気をつけると、まず\(e_x\)は先程書いたように、\(e_x、e_y、e_z\)はそれぞれ次のような式で表されます。
\(e_x \ = \ sin \ θ \ cos \ φ \ e_r \ + \ cos \ θ \ cos \ φ \ e_θ \ – \ sin \ φ \ e_φ\)
\(e_y \ = \ sin \ θ \ cos \ φ \ e_r \ + \ cos \ θ \ sin \ φ \ e_θ \ – \ sin \ θ \ e_φ\)
\(e_z \ = \ cos \ θ \ e_r \ – \ sin \ θ \ e_θ\)
逆に、\(e_r、e_θ、e_φ\)は次のように表されます。
\(e_r \ = \ sin \ θ \ cos \ φ \ e_x \ + \ sin \ θ \ sin \ φ \ e_y \ + \ cos \ θ \ e_z\)
\(e_θ \ = \ cos \ θ \ cos \ φ \ e_x \ + \ cos \ θ \ sin \ φ \ e_y \ – \ sin \ θ \ e_z\)
\(e_φ \ = \ – \ sin \ φ \ e_x+ \ cos \ φ \ e_y\)
3つのベクトル\(e_r、e_φ、e_θ\)の関係ですが、これはお互いに直交する大きさ1のベクトルなので、同じもの同士の内積を取ると大きさが1です。そして違うベクトルの内積を取ると、全部直交しているので内積は0になります。
・同じもの同士の内積=大きさは1
・違うベクトルの内積=大きさは0
それから、\(∇\)の回転を極座標で表すということをこの後やっていきますが、その時には外積というものが必要になってきます。
\(e_r・e_r \ = \ e_φ・e_φ \ = \ e_θ・e_θ \ = \ 1\)
\(e_r・e_φ \ = \ e_φ・e_θ \ = \ e_θ・e_r \ = \ 0\)
基底ベクトルの外積はそれぞれここに書いたように全部直交しているので、右ネジを回した方向のベクトルを向くということで、式は次のようになります。
\(e_φ×e_r \ = \ e_θ \ \ \ \ \ \ \ e_θ×e_φ \ = \ e_r \ \ \ \ \ \ \ e_r×e_θ \ = \ e_φ\)
外積にはこういう関係があります。
ここでちょっと補足しておきますが、外積の基本性質として、どっちに回るかによって向きが変わってしまいます。そのため、外積については交換法則は成り立ちません。つまり\(e_r×e_φ\)とした場合は\(e_θ\)にはならなくて、この時は次のようになります。
\(e_r×e_y \ = \ -e_θ\)
これも計算途中で使っていきます。
それから、他に使っていくものとして、それぞれを\(r、θ、φ\)で微分したものですが、先程書いた\(e_r、e_θ、e_φ\)、これらをそれぞれ\(r、θ、φ\)で偏微分してやれば出てきます。これは\(sin \ cos \)の微分なので、簡単に導出できると思います。
先程の式
\(e_r \ = \ sin \ θ \ cos \ φ \ e_x \ + \ sin \ θ \ sin \ φ \ e_y \ + \ cos \ θ \ e_z\)
\(e_θ \ = \ cos \ θ \ cos \ φ \ e_x \ + \ cos \ θ \ sin \ φ \ e_y \ – \ sin \ θ \ e_z\)
\(e_φ \ = \ – \ sin \ φ \ e_x+ \ cos \ φ \ e_y\)
↓
\(\frac{∂e_r}{∂r} \ = \ 0 \ \ \ \ \ \frac{∂e_r}{∂φ} \ sin \ θ \ e_φ \ \ \ \ \ \frac{∂e_r}{∂θ} \ = \ e_θ\)
\(\frac{∂e_φ}{∂r} \ = \ 0 \ \ \ \ \ \frac{∂e_φ}{∂φ} \ = \ – \ sin \ θ \ e_r \ – \ cos \ θ \ e_θ\ \ \ \ \ \ \ \ \frac{∂e_φ}{∂θ} \ = \ 0\)
\(\frac{∂e_θ}{∂r} \ = \ 0 \ \ \ \ \ \ \ \frac{∂e_θ}{∂φ} \ = \ cos \ θ \ e_φ \ \ \ \ \ \ \ \ \frac{∂e_θ}{∂θ} \ = \ -e_r\)
これだけを用いて計算していきます。
極座標での微分演算子(3次元)
\(∇\)の計算
まず∇を計算しておきます。\(∇\)は直交座標で書くと次のように書けます。
\(∇ \ = \ \frac{∂}{∂x}e_x+\frac{∂}{∂y}e_y \ +\frac{∂}{∂z}e_z\)
そこに先程の偏微分の公式を入れて\(e_x、e_y、 e_z\)に\(r\)で表した式をそれぞれ入れていくと、次のようになります。
\(∇ \ = \ \frac{∂}{∂x}e_x+\frac{∂}{∂y}e_y \ +\frac{∂}{∂z}e_z\)
\(= \ (\frac{∂}{∂r}\frac{∂r}{∂x}+\frac{∂}{∂θ}\frac{∂θ}{∂x}+\frac{∂}{∂φ}\frac{∂φ}{∂x})(sin \ θ \ cos \ φ \ e_r+cos \ θ \ cos \ φ \ e_θ \ – \ sin \ φ \ e_φ)\)
\(+(\frac{∂}{∂r}\frac{∂r}{∂y}+\frac{∂}{∂θ}\frac{∂θ}{∂y}+\frac{∂}{∂φ}\frac{∂φ}{∂y})(sin \ θ \ cos \ φ \ e_r+cos \ θ \ sin \ φ \ e_θ \ – \ sin \ θ \ e_φ)\)
\(+(\frac{∂}{∂r}\frac{∂r}{∂z}+\frac{∂}{∂θ}\frac{∂θ}{∂z}+\frac{∂}{∂φ}\frac{∂φ}{∂z})(cos \ θ \ e_r \ – \ sin \ θ \ e_θ)\)
これを展開して計算していくと、結果は次のような形になります。
\(= \ \color{red}{
\frac{∂}{∂r}e_r+\frac{1}{r}\frac{∂}{∂θ}e_θ+\frac{1}{r \ sin \ θ}\frac{∂}{∂φ}e_φ}\)
これは、とても複雑な形をしていますので、公式として覚えるにはあまりにも複雑すぎて、覚えられるような公式ではありません。だから、覚えるものではないのですが、やっぱり一度、自分でこれに従って計算して導出できるようになっておくことをお勧めします。
これで\(∇\)が極座標表記で書くとこのような形になったので、傾きは簡単に計算できます。
\(∇f\)(傾き)の計算
これはスカラ量\(f\)に\(∇\)を演算させるだけなので、次のような形になります。
\(∇f \ = \ (\frac{∂}{∂r}e_r+\frac{1}{r}\frac{∂φ}{∂θ}e_θ+\frac{1}{r \ sin \ θ}\frac{∂}{∂φ}e_φ)f\)
\(= \ \color{red}{\frac{∂f}{∂r}e_r+\frac{1}{r}\frac{∂f}{∂θ}e_θ+\frac{1}{r \ sin \ θ}\frac{∂f}{∂φ}e_φ}\)
\(∇×A\)(回転)の計算
それから回転について見てみますと、\(∇\)とベクトル\(A\)の回転というのは、ベクトル\(A\)に\(∇\)を外積演算させたもの、というのが回転でした。
これも、先程のようにまず代入して計算していくと、次のようになります。
\(∇×A \ = \ (\frac{∂}{∂r}e_r+\frac{1}{r}\frac{∂}{∂θ}e_θ+\frac{1}{r \ sin \ θ}\frac{∂}{∂φ}e_φ)×(A_re_r+A_θe_θ+A_φe_φ)\)
この外積を計算していくと、このような複雑式ということが計算できます。
\(= \ \color{red}{\frac{1}{r \ sin \ θ} \{ \frac{∂}{∂θ}(sin \ θ \ A_φ) \ – \ \frac{∂A_θ}{∂φ} \} e_r +\frac{1}
{r} \{ \frac{1}{sin \ θ}\frac{∂A_r}{∂φ} \ – \ \frac{∂}{∂r}(rA_φ) \} e_θ \ +\frac{1}{r} \{ \frac{∂}{∂r}(rA_θ) \ – \ \frac{∂A_r}{∂θ} \} e_φ}\)
\(∇^2f\)(ラプラシアン)の計算
最後に、今回使用する「ラプラシアン」の計算です。これは、\(∇f\)を先程計算したので、\(∇f\)にもう1回\(∇\)を演算させてやればいいわけです。
なので、\(∇f\)は先程計算した\((\frac{∂f}{∂r}e_r+\frac{1}{r}\frac{∂f}{∂θ}e_θ+\frac{1}{r \ sin \ θ}\frac{∂f}{∂φ}e_φ)\)の式なので、これにもう1度\(∇\)つまり \(\frac{∂}{∂r}e_r+\frac{1}{r}\frac{∂}{∂θ}e_θ+\frac{1}{r \ sin \ θ}\frac{∂}{∂φ}e_φ\)を計算します。
\(∇^2f \ = \ ∇(∇f) \ = \ (\frac{∂}{∂r}e_r+\frac{1}{r}\frac{∂}{∂θ}e_θ+\frac{1}{r \ sin \ θ}\frac{∂}{∂φ}e_φ)(\frac{∂f}{∂r}e_r+\frac{1}{r}\frac{∂f}{∂θ}e_θ+\frac{1}{r \ sin \ θ}\frac{∂f}{∂φ}e_φ)\)
これを展開して計算してやると、次のようになります。
\(=\color{red}{\frac{1}{r^2}\frac{∂}{∂r}(r^2\frac{∂f}{∂r})+\frac{1}{r^2 \ sin \ θ}\frac{∂}{∂θ}(sin \ θ\frac{∂f}{∂θ})+\frac{1}{r^2 \ sin^2 \ θ}\frac{∂^2f}{∂φ^2}}\)
ここでやりましたように、「\(∇\)(傾き)、発散、回転、ラプラシアン」を計算しましたが、これは数学の教科書あるいは物理の教科書にも公式として載っていますけれども、とても覚えられるような式ではありません。ですから1つだけ、単純に極座標を表した時の∇が「こうはなりませんよ」「ちょっと複雑な式になるんですよ」ということだけお伝えしておきます。
\(∇= \ \ \frac{∂}{∂r}e_r+\frac{∂}{∂θ}e_θ+\frac{∂}{∂φ}e_φ\) → ✕ こうはならない!
その理由は、基底ベクトル\(e_r、e_θ、e_φ\)が定ベクトルではなくて、\(r、θ、φ\)の関数だからです。これらにも微分演算をかけるので、とても複雑正式になってしまう、ということになります。
Earnshawの定理
それから、少し話が変わって「アーンショーの定理」というのが正電場ではあるのですが、これを証明する前に、まず定理として確認しておくと、「電荷のない空間ではポテンシャル=いわゆる電荷電位の極大点、極小点は存在しません」という定理があります。
🔵定理
🔲電荷のない空間ではポテンシャル(電位)の極大、極小点が存在しない
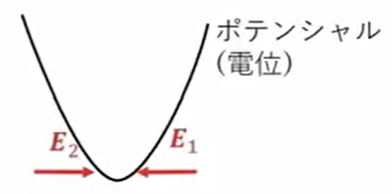
これを少し説明しておきますが、背理法でやっています。
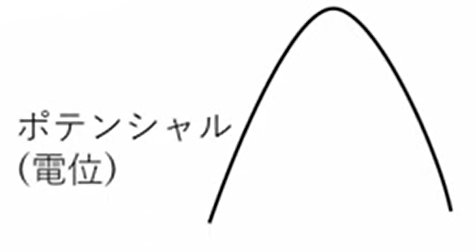
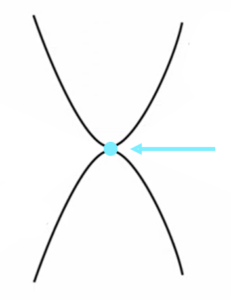
背理法というのは、もし電位に極大点があるとすると、図に書いたような点が存在するわけです。ということは、これは電場が右側では右向きに、左側では左向きに電場を持っています。
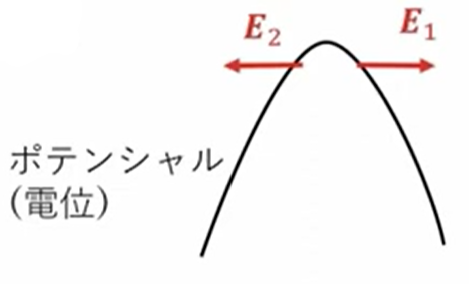
そして、以前もやりましたが、次の図に書いた青の破線の領域にガウスの定理を適用してあげます。
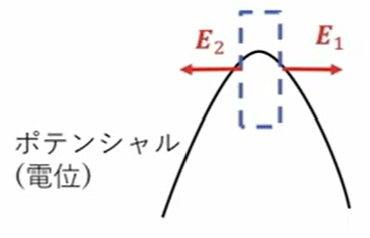
すると、両方のベクトルとも外側に向かって出て行ってるわけですから、この青の空間内に電荷が存在しなければいけないことになるので、これは「電荷がない」ということに矛盾します。従って極大点は存在しないということになります。
極小点に対しても同様です。
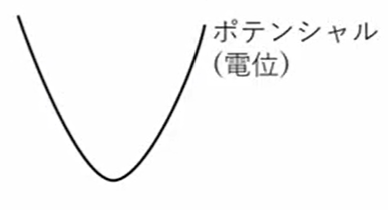
もしポテンシャル電位に極小点が存在すると、極小点付近での電場は右左でそれぞれ下図のように極小点に向かう方向の電位になります。
なので、先程と同じように青の破線の領域にガウスの定理を適用すると、電場は入ってくるだけで出ていかないので、この空間内にマイナスの電荷があるということになります。
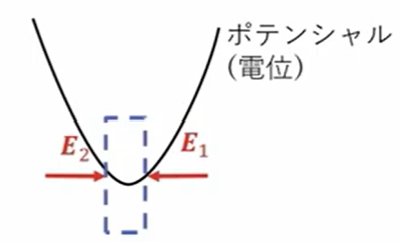
ということは「電荷がない」と仮定したことに矛盾するので、極小点も存在しません。
なので、背理法によって、電荷のない空間ではポテンシャル電位=極大・極小は存在しない、ということが言えるわけです。
これが1つの定理になっています。
Earnshawの定理
そしてアーンショーの定理ですが、アーンショーの定理というのは、荷電体です。いわゆる電荷です。「電荷は、静電力だけでは安定な釣り合いを保つことはできませんよ」というのが、アーンショーの定理です。
🔲荷電体は静電力だけで安定な釣り合いを保つことはできない
これについて少し説明します。もし、電荷がプラスを考えている場合、これが安定な釣り合いを保つためには、ポテンシャルに極小点がなければいけません。
これは力学でも同じなんですが、一番下のところを安定点とすると、少し右にずれると安定点に向かって左方向に戻らなければいけません。逆に、安定点から左にずれた時には、安定点に向かって右方向に戻らなければいけません。
これで安定点を保つ=極小点を持たなければいけないわけです。
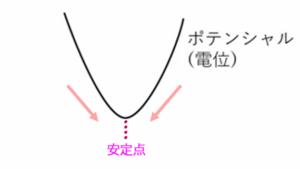
ところが、電場がないと極小点はないわけですから、静電気力だけでは荷電体は安定を保つことはできない、ということになります。
このことは、先程解説したラプラスの方程式に例えて考えてみると、\(∇^2V \ = \ 0\)つまり電荷がない場合、これがラプラスの方程式でした。そして、ラプラスの方程式の解には極大・極小点は存在しないということを意味しています。
ただし、これは境界では別です。\(x\)方向には極小点を持つけれども\(y\)方向には極大点を持たない、つまり図にすると次のような形になります。
2つの弧の接点について、図の上側の弧で見ると極小点なんですが、下側の弧から見るとここは極大点になっているので、これは極大点にはなっていません。こういう点は存在しています。ただし、極大・極小は存在しないということになります。
例題
ここで、ちょっと簡単な例題をやってみようと思います。
まず例題の1つ目です。
| 2枚の平行平面導体板の間に空間電荷が分布していて(二極管)、電位の分布が
\(V=V_0(x/d)^{\frac{4}{3}}\) (ただし、\(V_0\)は両極板間の電位差、\(d\)は両板間隔、\(x\)は低電位局からの距離)で表される。電荷密度の分布を求めよ。 |
今日日ほとんど使わなくなりましたが、二極真空管の話です。これは単純に、直線方向の一次元の方程式なので、次のようなことを言っています。
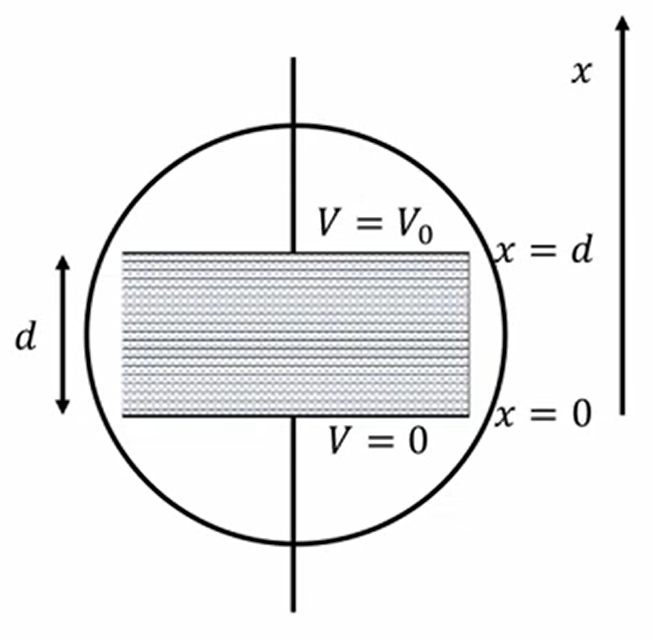
図は、真空管内のガラスを書いています。ここに2枚の極板間があって、下を電位ゼロ(\(V=0\))とすると上は\(V=V_0\)です。ということで、これの\(x\)管のここのところの電荷分布を求めます。
そうすると、単純に1次元の式になるので、直交座標におけるポワソン方程式を1次元で考えればいい、ということになります。式は次のようになります。
\(x\)方向にのみ変化しているから、1次元のPoisson方程式に従う
\(p(x) \ = \ – \ ε_0\ \frac{∂^2V}{∂x^2}\)
で、この\(V\)に問題文中の式の\(V\)を入れて計算するだけで、この微分は\(x\)が\(α\)上の形をしてますので、簡単にして計算すると、電荷分布はまず1回微分し、2回微分すると次のようになります。
\(p(x) \ = \ – \ ε_0\ \frac{∂^2V}{∂x^2} \ = \ – \ ε_0\frac{∂^2}{∂x^2} \{ V_0 (\frac{x}{d})^{\frac{4}{3}} \} \)
\(= \ -ε_0\frac{∂}{∂x} \{ \frac{4}{3}V_0 ( \frac{x}{d})^{\frac{1}{3}} \} \)
\( = \ -\frac{4ε_0V_0}{9d^2}(\frac{x}{d})^{-\frac{2}{3}}\)
\(-\frac{2}{3}\)乗に従ったような電荷分布をしている、ということになります。
それから2つ目の例題として、極座標を使う典型を扱ってみます。
| 原点から\(r\)の距離での電位が\(V \ = \ V_0e^{-\frac{r}{a}}\)で表される電場内の電荷分布を求めよ。 |
これは\(r\)で表されているので、点対称の電荷分布をしているということになります。
なので、3次元極座標を使うことが非常に相性がいいわけですが、先程書いたようにポワソン方程式の\(∇^2\)を極座標表示してやると、こんな複雑な式になります。
\(∇^2V \ = \ \frac{1}{r^2}\frac{∂}{∂r}(r^2\frac{∂V}{∂r})+\frac{1}{r^2 \ sin \ θ}\frac{∂}{∂θ}(sin \ θ \ \frac{∂V}{∂θ})+\frac{1}{r^2 \ sin^2 \ θ}\frac{∂^2V}{∂φ^2} \ = \ -\frac{ρ}{ε_0}\)
ただし、問題文中の式にある\(V\)が、\(r\)だけの関数、つまり点対称になってるわけです。ということは、\(θ\)と\(φ\)の項は全部消えてしまいますので、上の式の\(\frac{1}{r^2}\frac{∂}{∂r}(r^2\frac{∂V}{∂r})\)の項だけしか残りません。
なので、上のポワソン方程式はシンプルに次のように書くことができます。
\(V\)は\(r\)だけの関数なので
\(\frac{1}{r^2}\frac{∂}{∂r}(r^2\frac{∂V}{∂r}) \ = \ – \ \frac{ρ}{ε_0}\)
このように、球面座標はもともとはとても複雑な形をしているのですが、対称性を持つ場合に非常にシンプルになって表すことができます。これを直交座標系で表示しようとすると、次のようなものが出てくるので、とっても数式的には大変ですが、計算できないことはないです。
\(\sqrt{x^2+y^2+z^2}\)
それよりも、極座標を使った方が相性がいいわけです。あとはこれに従って微分をするわけですので、電荷密度\(ρ\)は次のように展開できます。
\(ρ \ = \ -ε_0\frac{1}{r^2}\frac{∂}{∂r}(r^2\frac{∂V}{∂r})\)
これは積の微分を使って展開してやると、次のような形になります。それぞれ\(V\)の微分は単純に指数関数の微分なので非常に簡単な形をしています。なので次のような形に計算できる、ということになります。
\(ρ \ = \ -ε_0\frac{1}{r^2}\frac{∂}{∂r}(r^2\frac{∂V}{∂r}) = \ -ε_0 \{ \frac{∂^2V}{∂r^2}+\frac{2}{r}\frac{∂V}{∂r} \} \ = \ \frac{ε_0V_0}{a}(\frac{2}{r} \ – \ \frac{1}{a})e^{- \ \frac{r}{a}} \)
以上ですが、今回はポワソン方程式、ラプラス方程式とは何なのかということを学習しました。それに付随して、アーンショーの定理を紹介し、最後に簡単な例題を少し解いてみました。
以上です。
↓動画版はこちら!
江口和弘講師:「【大学物理】電磁気学 第4回 – 電気力線とGaussの法則」(所要時間 29:05 )
江口 和弘 講師
東京大学大学院工学系研究科修了。
親しみやすさと的確な指導で、複数科目の単位を落とした生徒を全科目ともに単位取得に導くなど、とても頼りになる先生です。
人気記事
-
【大学受験-面接対策】志望理由書の書き方についてのQ&A
2024.04.29
-

【総合型選抜】プレゼンテーションの作り方
2023.11.07
-
【大学数学】線形代数 第1回 -行列の基本変形・連立方程式の掃き出し法による解法-
2024.04.21

